機械與自動化系本科生以第一作者在力學(xué)TOP國際期刊發(fā)表學(xué)術(shù)論文
近日,機械與自動化系智能制造技術(shù)實驗室成員2022級機械電子工程專業(yè)本科生辛岳川以第一作者身份在國際知名力學(xué)TOP期刊《Nonlinear Dynamics》上發(fā)表題為《Nonlinear dynamics study of hybrid mechanism considering three-dimensional revolute joint clearance》的SCI二區(qū)學(xué)術(shù)論文(論文通訊作者:姜帥)���。
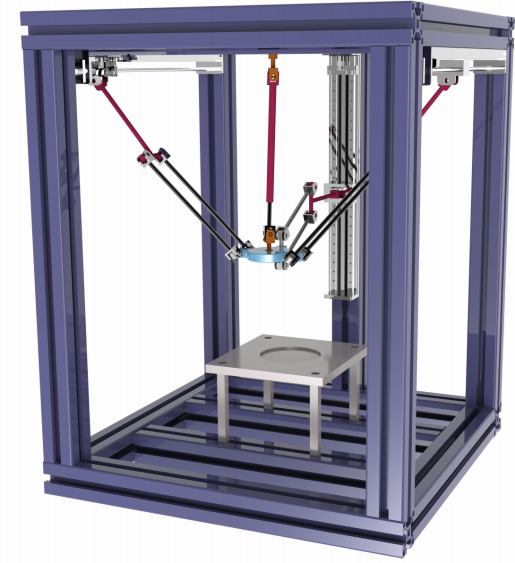
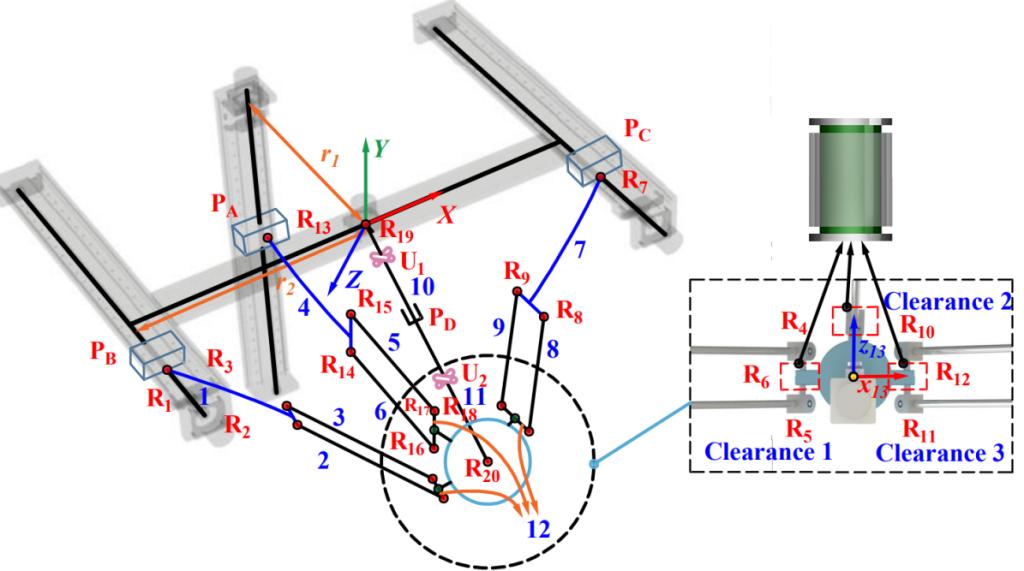
該研究建立了含三維轉(zhuǎn)動副間隙混聯(lián)機器人的精確非線性動力學(xué)模型����,系統(tǒng)深入地探究了運動副間隙對混聯(lián)機器人動力學(xué)響應(yīng)�����、混沌特性����、可靠性的影響機制,形成了一套完整的動力學(xué)分析理論體系����,為工業(yè)生產(chǎn)過程中混聯(lián)機器人的維護及故障診斷提供了理論基礎(chǔ)與實踐指導(dǎo)。培養(yǎng)了學(xué)生的精確建模與分析能力�����,提高學(xué)生的實踐動手能力與創(chuàng)新意識���,激發(fā)學(xué)生的學(xué)習(xí)興趣�����,助力教學(xué)質(zhì)量的穩(wěn)步提升�����。本研究受到山東省自然科學(xué)基金(ZR2023QE039)和教育部重點實驗室開放課題基金(KFKT202402)提供的經(jīng)費支持��。
DOI:10.1007/s11071-025-10985-9
此外��,機械與自動化系智能制造技術(shù)實驗室成員2022級機械電子工程專業(yè)本科生辛岳川�����、朱加諾等積極參與大學(xué)生學(xué)術(shù)課題���,成功申請立項山東省青少年教育科學(xué)規(guī)劃項目大學(xué)生學(xué)術(shù)課題(指導(dǎo)教師:姜帥)����。

 Copyright?2020 山東科技大學(xué)濟南校區(qū)魯ICP備09051012號-4 魯公網(wǎng)安備37010502001167號
Copyright?2020 山東科技大學(xué)濟南校區(qū)魯ICP備09051012號-4 魯公網(wǎng)安備37010502001167號 




